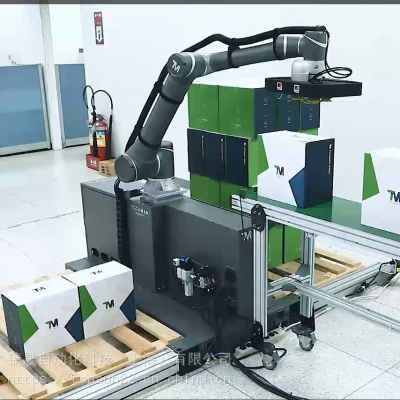
| 产品特性:操作简便 | 是否进口:否 | 产地:中国 |
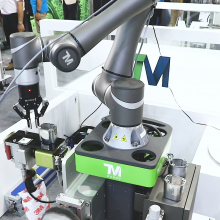
| 工作范围:1100 | 品牌:TM | 型号:TM14 |
| 关节数量:6 |
一、协作机器人通常有以下特点:
1.轻量化:机器人体型越小,安全性就会提升。
2.友好性:表面和关节光滑平整,没有尖锐的转角或者容易夹伤的缝隙。
3.人机协作:具有敏感的力反馈特性,当机器人的力度达到设定值时会立即停止。
4.编程方便:非技术背景也能轻松进行编程与调试
二、 不同载荷的协作机器人受应用场景和结构特点的限制,协作机器人载荷一般不会超过20kg。我们通常将轻载协作机器人的载荷定义在3-10kg,重载协作机器人载荷在10kg以上,桌面级协作机器人载荷小于3kg。反之则不成立,比如小于3kg的机器人不一定是桌面级机器人。
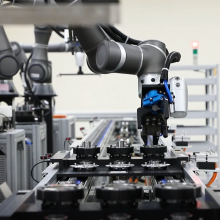
三、 轻载协作机器人是目前最常见的协作机器人,主要用于消费电子、测试、医疗及服务行业;
重载协作机器人常用于装配、搬运、码垛、包装等工业场景;
桌面型协作机器人则应用于分拣、点胶、涂胶、自动化测试等工作场景。